Baseline Robotics
Our mission is to democratize hardware access for robotic manipulation. Train and evaluate your policies on real stations through our API, while we own, operate, and maintain the hardware.
Hardware
Book bimanual manipulation today. Dexterity stations coming soon.
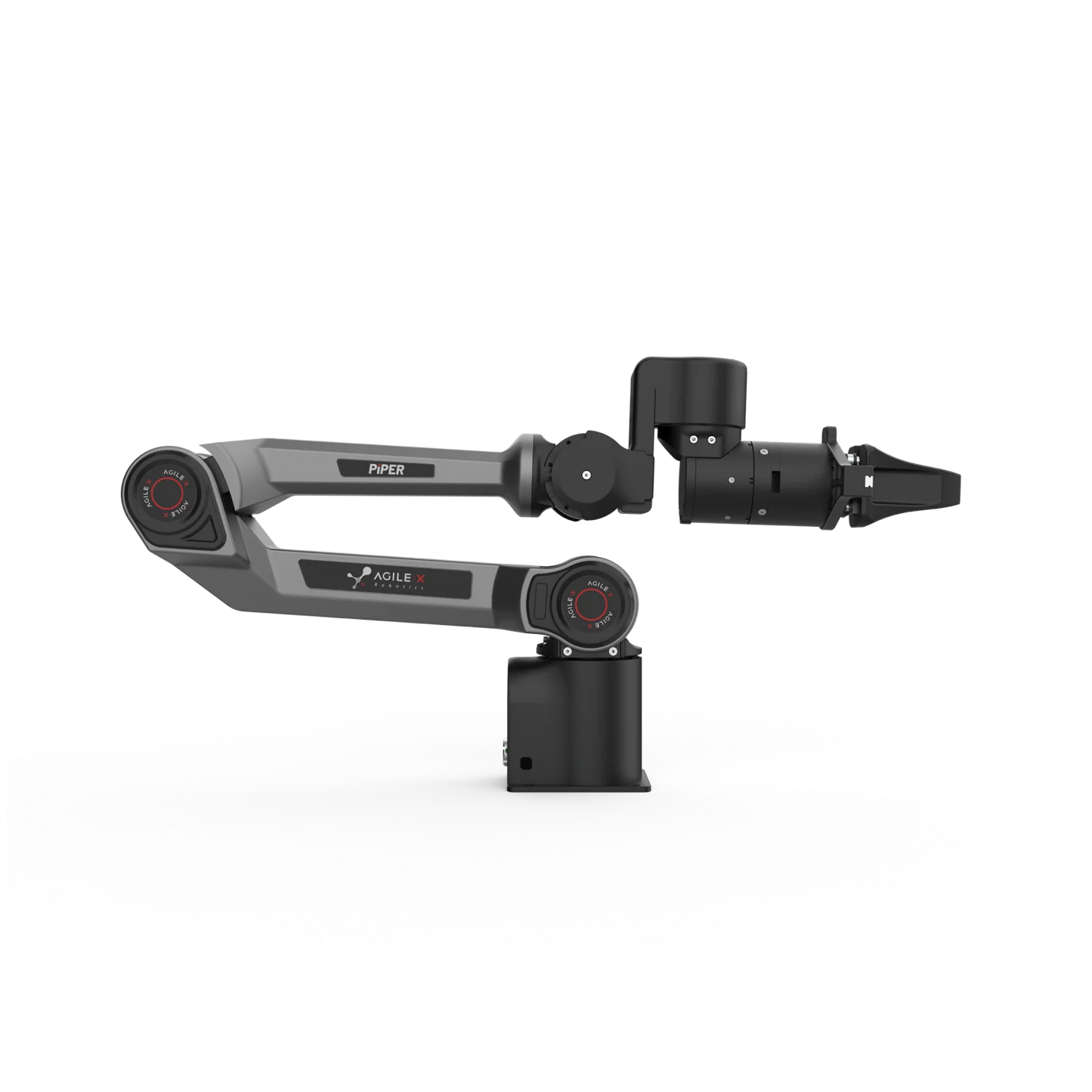


Bimanual manipulation stations
Dual 6-DoF arms with parallel-jaw grippers.

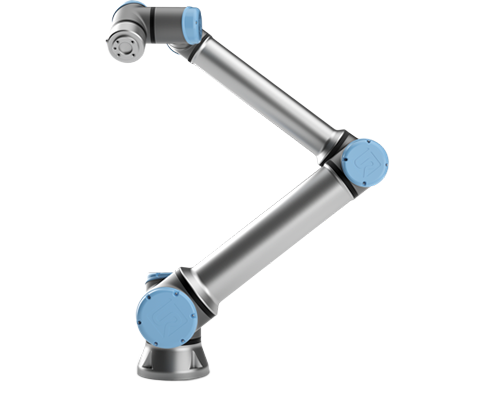
Dexterity stations
Multi-finger hands for dexterous tasks.
How it works
Submit policy runs with task settings and metrics.
uv tool install bsln
# Submit a policy evaluation to a station, then download the results.
bsln jobs submit \
--station bimanual/v1 \
--model pi0.5 \
--policy-endpoint "$POLICY_ENDPOINT" \
--task fold_towel \
--episodes 32
bsln jobs download job_c91d --output ./runs/fold_towel